Table des matières
Ramp Wiring
Câblage des périphériques
Un schéma équivalent à mon installation :

Source : Snappy Reprap Wiki
Le connecteur 11A a crâmé ![]()
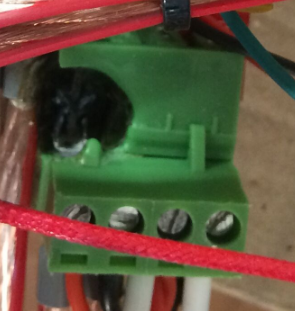
J'ai donc soulagé la carte par l'ajout d'un relais en sortie D08 (le mosfet chauffait beaucoup trop de toute façon) :

NB : Penser à la petite diode de roue libre
J'ai ajouté un ventilateur pour refroidir la carte et les pilotes de moteur pas à pas.
Penser à bien dimensionner les sections de câble en fonction des distances et des puissances à fournir (Section de câble DC)
J'ai mis de 2.52 pour la partie alim et lit chauffant.
Voir pou un Snubber pour limiter les perturbations : Cyrob - Snubber
Réglage des pilotes de moteurs pas à pas
Un très bon article sur les pilotes (stepstick) : Wiki Vorobotic (Je garde dans un coin au cas où)
- Comparaison A4988/DRV8825
- Des liens sur la calibration
- Les silent stepstick : reso-nance.org
- Protection par diode
Un très bon article sur la calibration : Genapart (Je garde dans un coin au cas où)
J'ai pour ma part ajusté les cavaliers en 1/32 de pas et la tension des DRV8825 pour un courant max de 1.7A adapté aux moteurs 17HS4401.
- A voir pour réduire la résolution de l'axe Z et du moteur de l'extrudeur comme conseillé dans l'article Genapart.
- Voir les silent stepstick
- Voir pour le lissage par diode : Stepper Smoother (pas trop convaincu)