Table des matières
Auto Bed Levelling
BL Touch
Le BL Touch s'utilise sur tout type de plateau par test mécanique, c'est le choix qui s'impose ici : Le capteur inductif fonctionne avec un plateau métallique.
Installation du capteur
Support
Impression du support BL Touch pour l'E3DV6 Bowden: https://www.thingiverse.com/thing:2206026
Wiring
Correspondance des fils:

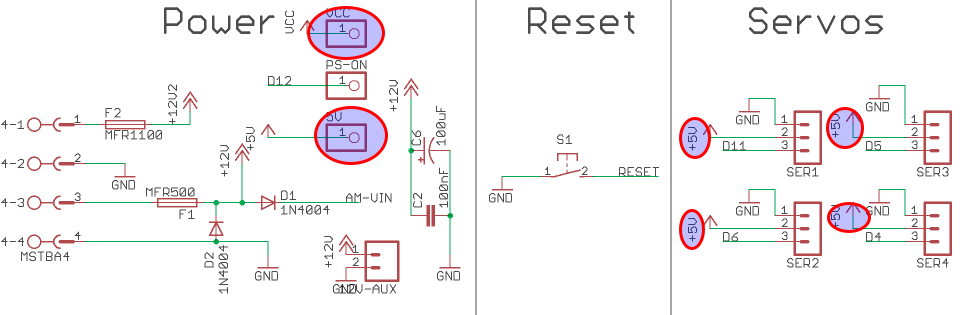
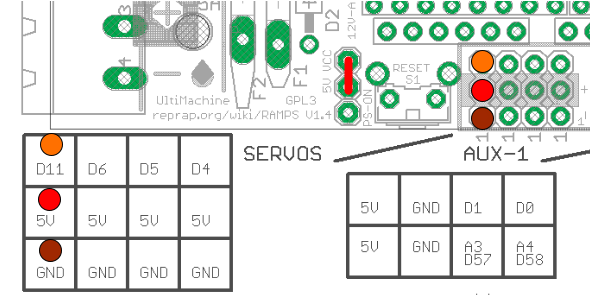
Pour alimenter le BL Touch envoyer le Vcc (5v) de l'alim sur l'entrée 5v des servos via un jumper et câbler les fils marron/rouge/orange:
 |  |
Remplacer ensuite le endstop Z par la sortie logique du BLTouch :
 |  |
Modification de Marlin
Documentation
La doc officielle : https://www.antclabs.com/bltouch
La documentation Aliexpress de la copie : TL-Touch
La documentation Marlin associée : http://marlinfw.org/docs/configuration/probes.html
La doc pour la CR10 : http://www.cr10.fr/installation-dun-autolevel-type-bltouch
Le code
Un erreur s'est glissée dans la doc fournie sur aliexpress. Il faut utiliser :
#define Z_MIN_ENDSTOP_INVERTING false''
S'agissant d'une copie de l'officielle BLTouch il ne suffit pas de commenter l'option dans le code Marlin.
La ligne de code assurant le réglage de la hauteur de buse est la suivante (à ajuster avec la technique de la feuille de papier) :
// Pour se rapprocher du plateau il faut diminuer (-2 est plus proche du plateau que -1) : #define Z_PROBE_OFFSET_FROM_EXTRUDER -1.20 // Z offset: -below +above [the nozzle]''
In fine les modifications apportées sont les suivantes : commit e1ceb3
NB :
- les modifications apportées pour l'UBL ne sont pas nécessaires puisque j'utilise le mode LINEAR.
- attention à bien paramétrer les points de test pour ne pas sortir le capteur du plateau.
Tunning
La reproductibilité qu'apporte le bed levelling m'a permis d'ajuster le flux de matière pour une première couche impeccable :commit c135ebc
Modification du Slicer
Le GCODE fournit à l'imprimante doit comporter la phase d'autolevelling en préambule :
M280 P0 S160 ; BLTouch alarm release G4 P100 ; delay for BLTouch G28 ; home G29 ; auto bed leveling
En images
 |  |
Inductive Sensor
Support LJ12A3-4-Z/BY Inductive Proximity Sensor Switch : https://www.thingiverse.com/thing:1695758/files